Application Solution for FET3568J-C Robot Control System
The robot control system is a core component of modern robotics technology, enabling robots to perform various tasks and actions, ranging from industrial production to healthcare and even household services. The robot control system is like the brain of the robot and is the primary component that determines its functions and performance.It is generally composed of four main parts: the robot controller (motion control), servo drives, IO modules, and power system.
In this article, we will explore the main features of the robot control system and the FET3568J-C industrial-grade SoM recommended by Forlinx Embedded as the main control platform for the robot controller. Give us an insight into the importance of robot control systems and their application in modern robotics.
The main functions of the robot control system include:
Path planning and motion control: The control system is responsible for planning the robot's path so that it can move through the environment and take appropriate actions.
Obstacle avoidance and safety: The control system can detect obstacles and take steps to avoid collisions. It can also implement an emergency stop program to ensure the safety of the robot.
Mission implementation: Robot control systems can perform a variety of tasks, including picking and placing objects, assembly, welding, cleaning, surveying, and more.
Autonomy: For autonomous robots, the control system possesses decision-making capabilities, allowing them to independently perform actions based on the environment and tasks at hand without the need for human intervention.
Communication: Control systems typically communicate with other devices or operators to receive commands, send status reports, or request help.
The robot controller is the core part of the robot, mainly controlling the robot's motion position, attitude and trajectory in the workspace, as well as the sequence of operation, etc.; each joint of the robot needs to synchronize and coordinate the operation in real time, and the servo drive is indispensable to realize these complex actions; the IO module associates the digital input signals with the control signals of the system, so that it can realize the control of the robot system; finally, the stable power supply system is the guarantee of the safe operation of the robot.
The robot controller is the core component used to manage and control the behavior of the robot. It is usually an embedded system responsible for receiving sensor data, executing control algorithms, making decisions about the robot's movements, and communicating with the external environment or the operator. Meanwhile, the main role of the robot controller is to complete the computation and control of multi-axis motions, so the main controller of the robot controller needs to have a high-performance CPU, a built-in, real-time operating system, support for the EtherCAT industrial bus, and a rich set of functional interfaces.
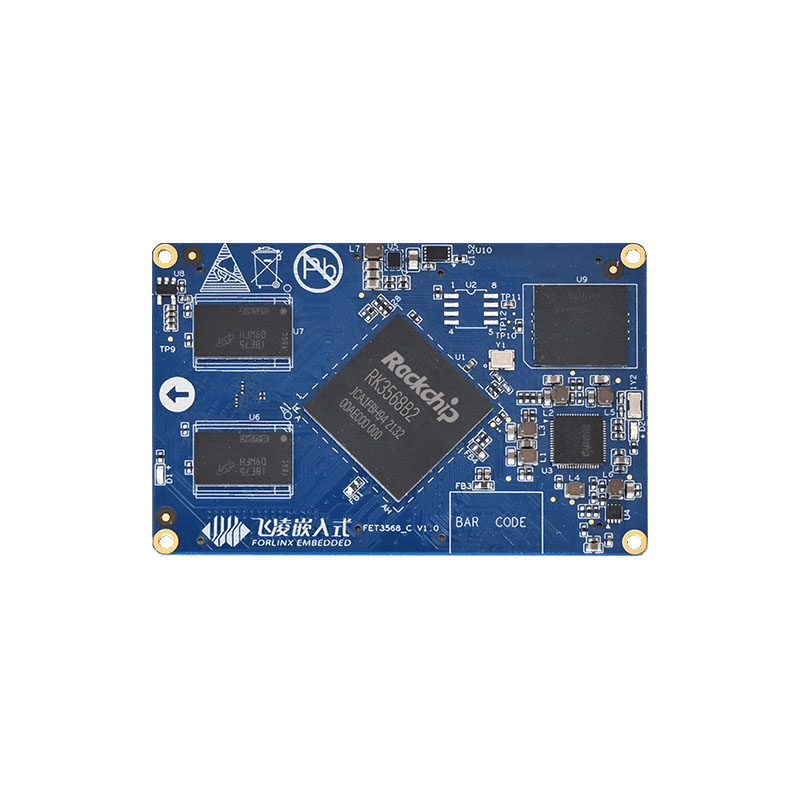
Forlinx Embedded recommends using the FET3568J-C industrial grade SoM as the main control platform for the robot controller. FET3568J-C SoM is designed and developed based on Rockchip RK3568J industrial-grade processor.The quad-core 64-bit Cortex-A55 architecture has a high frequency of up to 1.8GHz, providing powerful performance support. It also features a built-in NPU with a calculation power of 1TOPS, capable of meeting lightweight edge AI computing demands. Additionally, it supports real-time patch Preempt rt87, reducing latency to10μs~50μs, which satisfies real-time requirements for various applications in the industrial field.
FET3568J-C computer on module supports a 2-lane Gigabit network. Customers can choose and port EtherCAT according to their own needs. If they need more than 2 lanes, which can be realized through the USB expansion; it is equipped with 3-lane CAN,2-lane CAN2.0,10-lane UART,4-lane SPI,16-lane PWM,5-way IIC, USB3.0,4G/5G, WiFi, LVDS and HDMI, etc.The rich high-speed interfaces make the function expansion and connection more efficient and simple.