Allwinner T507 SoM 4 Lanes AHD Camera Implementation Program
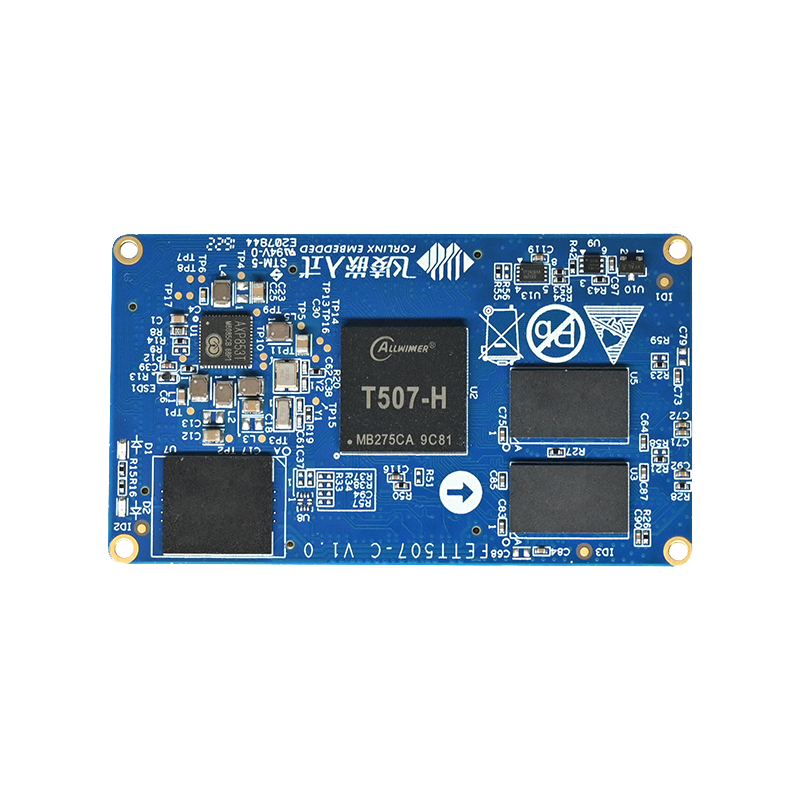
Forlinx FETT507-C core board with Allwinner T507 processor has gained a high reputation in the market since its launch in May this year for its ease of use, versatility and cost-effectiveness. In order to make it easier for users in different industries to develop products using the FETT507-C SoM, Forlinx engineers continue to expand the application its implementation of to reduce the development workload of user engineers.
i. Briefly describe the AHD camera
AHD, short for AnalogHighDefinition (Analog HD), enables reliable transmission of ultra-long-range (500 m) HD video signals over existing analog transmission lines, using advanced Y/C signal separation and analog filtering technology to effectively reduce color noise in high-frequency areas and provide better image reduction. Compared to traditional analog HD products, AHD (analog) camera surveillance image quality has a qualitative leap and improvement, the highest resolution can be equivalent to the network HD camera 1080P Full HD level.
AHD cameras are as easy to operate as conventional devices, can be used with ordinary coaxial cable to carry out up to 500 meters of high-definition lossless transmission, breaking the transmission distance limit of existing transmission technology of high-definition video, can achieve low-cost, long-distance, no delay, high efficiency, anti-jamming and easy to implement million-pixel high-definition video transmission.
It is because of the many advantages of AHD cameras that they have excellent use value in the automotive industry as well as in the field of security monitoring. For example, many buses now use AHD cameras, multi-AHD camera video image collected into a monitor, so that a monitor can watch multiple angles of monitoring, in the convenience of the driver to observe at the same time to help the driver reduce the visual blind area, making the bus travel more safe.
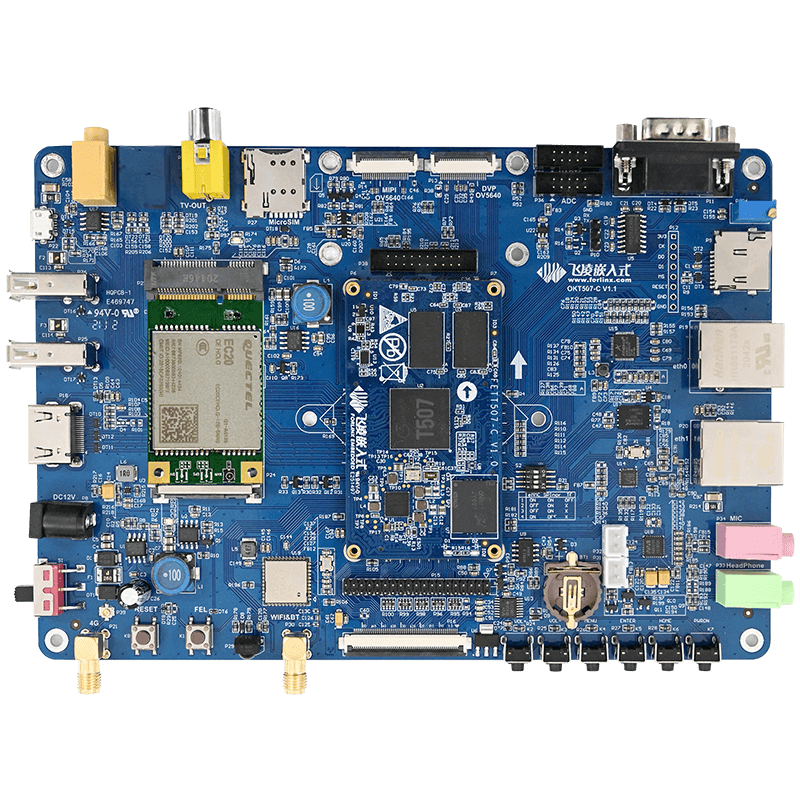
Second, the implementation of FETT507-C core board equipped with 4 AHD camera
The implementation of four AHD cameras on the FETT507-C core board is introduced. First look at a topology diagram:
As shown in the figure above, the implementation of this scheme is to connect the 4 AHD camera via the Forlinx AHD camera MIPI transfer board, connect with the bottom plate equipped with the FET507-C core board via the MIPI-CSI interface, and finally display the image captured by the 4 AHD camera in the same display (HDMI, LVDS or RGB interface are supported).
The following image shows the measured effect:
The AHD camera MIPI transfer board model used in this scheme is FIT-MIPI-4ACAM, which can simultaneously input the video signal of the 4 AHD camera into the bottom plate equipped with FETT507-C core plate to complete the input work of the video, and the resolution supports 720p@60FPS or 1080p@30FPS. The signal conversion chip selected by Forlinx on the transfer board is certified as a vehicle regulation.
Let's take a look at a scenario simulation of a commercial vehicle intelligent driving terminal based on the FET507-C core board with a four-lane AHD camera solution:
The intelligent driving terminal of commercial vehicles designed with this scheme can be easily realized whether it is 360-degree round-the-world or in-car HD monitoring with the simultaneous preview of the 4 AHD camera. It also supports the functions required for forward collision warning and lane departure alarm for vehicles such as 4G/5G communication, lidar, mmWave radar, and ultrasonic sensors.
Finally, summarize the FET507-C core board 4 lanes AHD camera implementation scheme:
- 1. Up to 4 lanes AHD cameras can be accessed at the same time, can fully play the image acquisition advantages of AHD camera’s HD, easy installation, transmission distance.
- 2. The accessed AHD video can be output to a variety of interface display devices, including HDMI display, LCD or LVDS screen;
- 3. Can quickly develop vehicle vision, video surveillance console and other products;
- 4. With the performance of a strong and stable FETT507-C core board, to ensure the stable operation of the program.